可进入设备内部的狭小空间,携带摄像头或其他探测器具实现指定位置的探测。可在曲面上吸附爬行,并自动适应曲面的曲率变化。
机器人整体尺寸长宽高为200mm×60mm×50mm,不带电缆重量为600g,携带四路LED高清4mm微型内窥镜摄像头,拖缆长度为5m。
机器人具有伸缩、俯仰、偏航的运动能力。机器人的最大步幅为70mm,左右偏航最大角度70°,上下俯仰最大角度45°;可实现平面、曲面和90°垂直面爬行;垂直壁面爬行时最大拖动负载800g,水平爬行时牵引力20N。

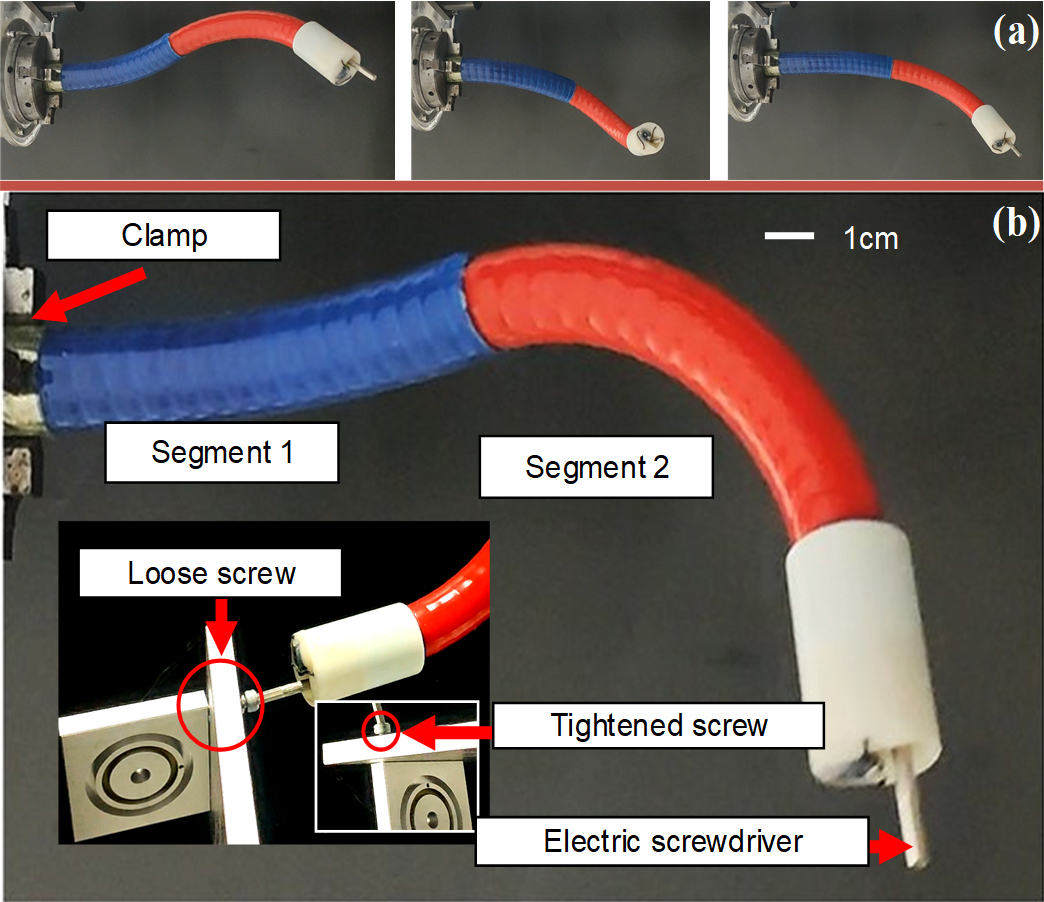
仿象鼻的高度灵活的软体机械臂,而且可以伸缩,可将其安装在爬壁机器人前端作为操作臂完成任务,进一步提高机器人进入更狭小空间的能力和操作灵活性,完成类似激光焊接、拧紧螺母、抓取异物等操作。软体机械臂运动过程如下图所示,由图可以看出其高度的运动灵活性

机械臂末端可携带执行工具完成一些检修任务,如拧紧螺钉等,如下图所示。
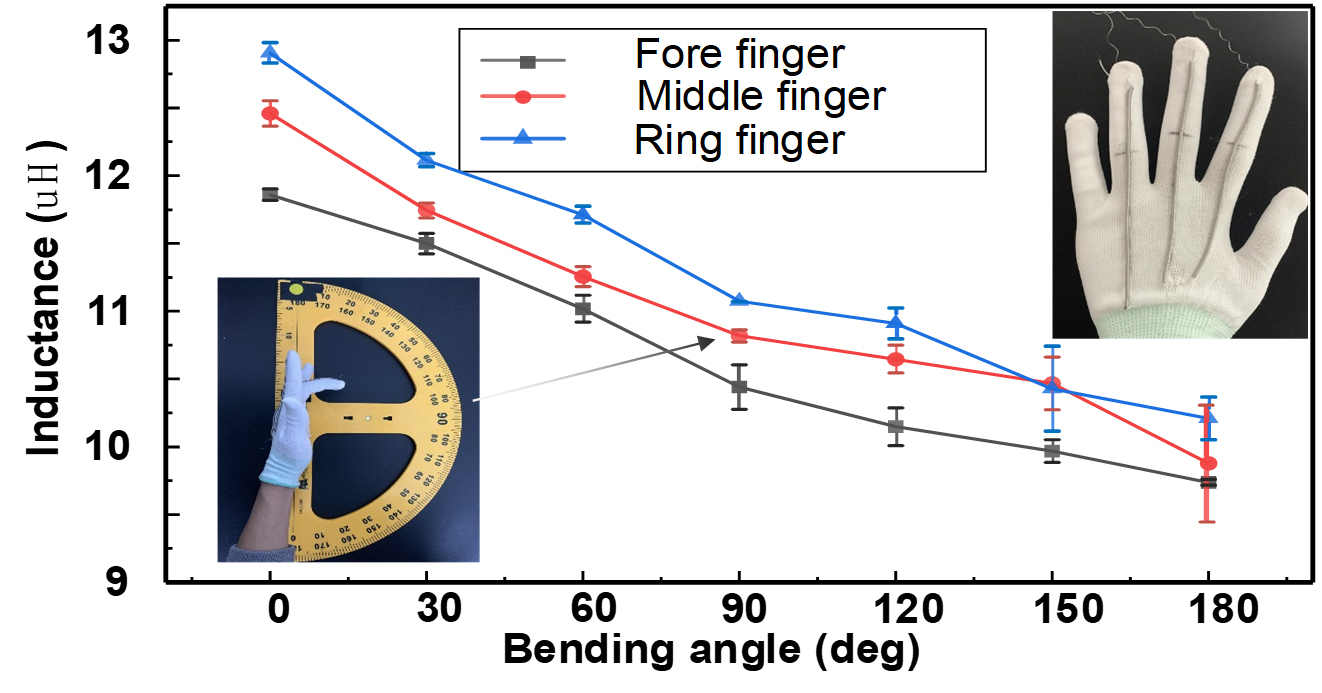
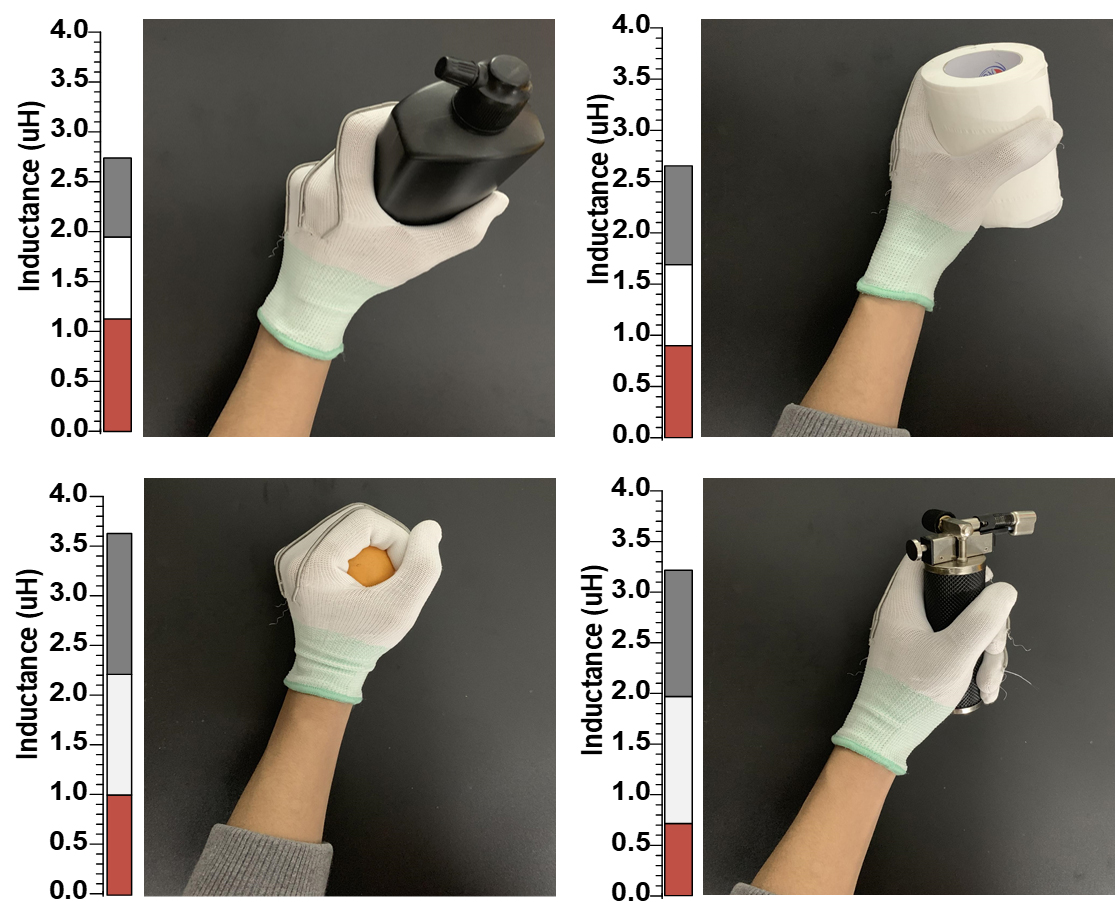
公司开发出硅橡胶电容式应变传感器和细丝电感式应变传感器,两种传感器都可以检测物体的超大变形,应变检测范围0-200%。硅橡胶传感器适于贴在物体表面检测,细丝传感器适于嵌入物体内部检测。硅橡胶传感器的重复性精度2.3%;细丝传感器的重复性精度0.1%。两种传感器也可用于人体关节运动测量,如下图所示。